Vision-Guided-Ball-Balancing-2DOF
2DOF Ball Balancing Plate using STM32, OpenCV, and PID/LQR Control
Table of Contents
Project Description
Developed during MCTR601 Mechatronics Engineering course (BSc in Mechatronics Engineering) at the German University in Cairo (GUC), this project implements a real-time ball balancing system using computer vision and embedded control to stabilize and track a ball on a 2-degree-of-freedom (2DOF) tilting platform. The primary goal is to design a system that can dynamically stabilize a rolling ball by adjusting the tilt of a platform in both the x and y directions.
Key Features
| Feature | Description | |———|————-| | Multi-Control Strategies | PID, PV (Proportional-Velocity Controller), and LQR for dynamic stabilization | | Trajectory Tracking | Follows predefined paths (circle, figure-8) or user-drawn real-time trajectories via GUI | | Laser Tracking | Ball chases a moving laser dot projected on the platform | | Online Tuning | STM32F103C8T6 communicates online with PC via FTDI Serial Module for parameter tuning and monitoring system states |
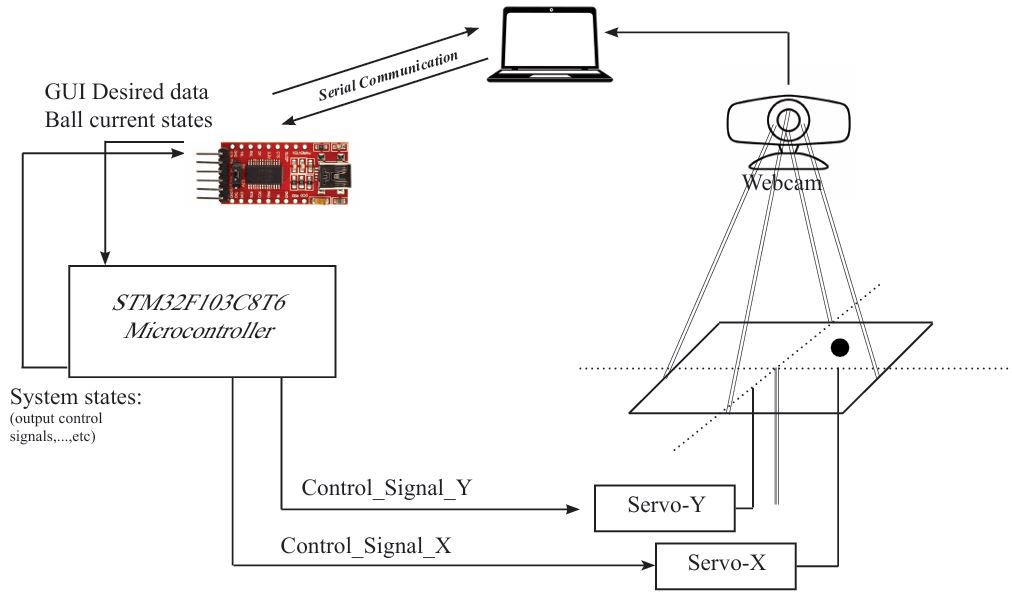
Functional Diagram
Technical Stack
Vision System
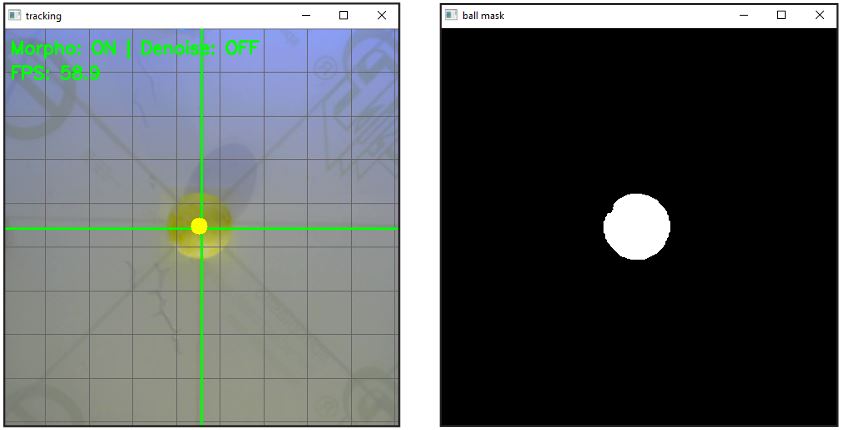
- Python and OpenCV pipeline for image processing, including ball and laser detection.
- HSV color filtering for robust object detection under varying lighting conditions.
- Kalman filter and Exponential Moving Average (EMA) filter for enhancing position stability and trajectory prediction by minimizing noise.
- Velocity estimation by computing positional change over time.
Control System
- PID, PD (PV), and LQR controllers implemented and tuned for stable balancing.
- STM32F103C8T6 Bluepill microcontroller as the control backbone.
- PWM-driven servo motors (MG996R) actuate platform angles based on control input.
- Kalman filter provides reliable velocity estimates used in the control loop.
- Exponential Moving Average (EMA) filter applied to the controller’s output for smoothing.

GUI Interface
- Java-based Graphical User Interface (GUI) powered by JavaFX provides full user control.
- Enables interactive trajectory drawing, mode selection, control algorithm switching, real-time monitoring, data logging, and online parameter tuning.
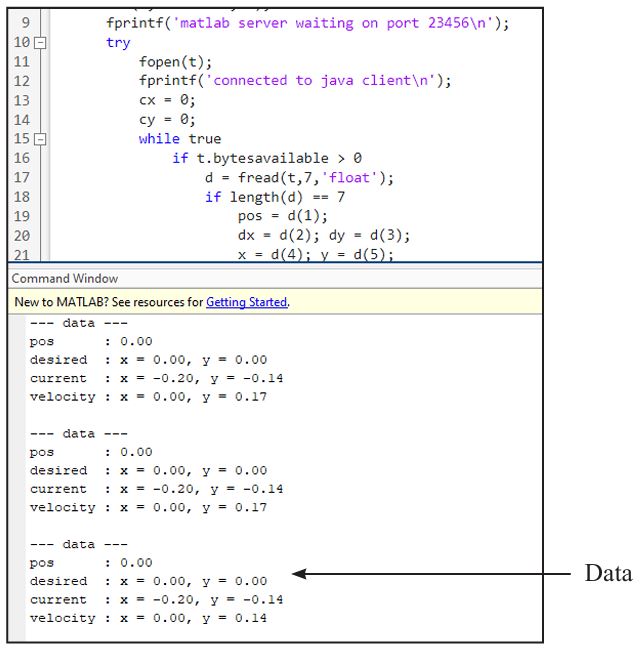
- Communicates with the STM32 via UART through FTDI and opens a TCP/IP socket for communication with external software like MATLAB or Python.
Trajectory tracking
-Circle trajectory
Hardware Components
- 2x MG996R Servo Motors: High-torque servos for precise two-axis tilt control.
- USB Webcam: Mounted above the platform to capture real-time video of the ball’s position.
- Laser pointer: Used for detection and tracking.
- STM32F103C8T6 (Bluepill): Low-cost microcontroller serving as the system’s control backbone.
- USB to TTL Converter - FT232RL FTDI Serial Module: Used for communication between the PC (GUI) and the STM32.
- Power Supply
- Buck Converter XL4015
- Power Distribution Board
-
Tiltable platform
Project Highlights
- Multidisciplinary Integration: Effectively integrates embedded systems, computer vision, and control theory.
- Real-Time Performance: Designed for real-time dynamic ball balancing, with a vision pipeline maintaining tracking performance up to 60 FPS. System components work cohesively to achieve real-time stabilization.
System Architecture
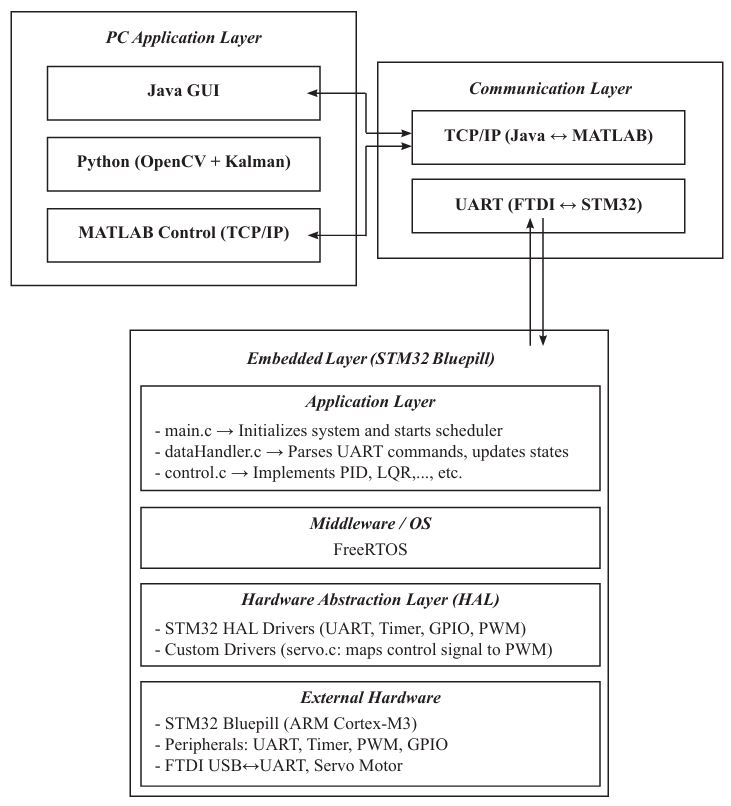
The system follows a layered architecture structure to ensure modularity, scalability, and maintainability.
- PC Application Layer: Hosts the Java GUI, Python program (using OpenCV and Kalman filter for image processing and tracking), and can interface with MATLAB Control via TCP/IP.
- Communication Layer: Handles communication between the PC and the embedded system via UART (using an FTDI converter) and enables PC-to-PC communication (e.g., Java GUI to MATLAB) via TCP/IP.
- Embedded Layer (STM32 Bluepill):
- Application Layer: Contains the main system logic (
main.c,dataHandler.c,control.c,servo.c). - Middleware / OS: Utilizes FreeRTOS scheduler.
- Hardware Abstraction Layer (HAL): Includes STM32 HAL Drivers and custom drivers (
servo.c). - External Hardware: The STM32 Bluepill and its peripherals.
- Application Layer: Contains the main system logic (
This architecture allows for seamless integration between software and hardware for responsive, accurate control.
Hardware
The physical system consists of a flat platform mounted on two servo motors arranged orthogonally, controlling tilt along the X and Y axes.
- Servo Motors (2x MG996R): Provide precise two-axis control for ball stabilization. Driven by STM32-generated 50Hz PWM signals (500-2500μs pulse width). Torque output of 11kg·cm at 6V and angular velocity of 0.15sec/60°. Metal gear transmission for durability. Connected to the platform via 47mm servo arms.
- Webcam: Captures live video frames at runtime.
- STM32F103C8T6 (Bluepill): Serves as the control backbone. Receives processed ball position data via Bluetooth from the PC (Note: Later sections mention UART/FTDI and TCP/IP for PC communication), applies the selected control algorithm, and generates PWM signals for servos.
- FTDI USB to TTL Converter: Facilitates serial communication between the PC and STM32.
- Power Supply and Buck Converter (XL4015): Provide necessary power to the components.
Technologies
The project integrates several key technologies:
- Microcontroller: STM32F103C8T6 (Bluepill) running FreeRTOS.
- Computer Vision: Python and OpenCV for real-time image acquisition, preprocessing, object detection (ball and laser) and position/velocity estimation.
- Control Theory: Implementation of PID, PD (PV), and LQR control algorithms. System modeling, linearization, and transfer function analysis. Discretization techniques for digital implementation.
- Actuation: Servo Motors (MG996R) driven by PWM signals from the STM32.
- User Interface: Java-based GUI (JavaFX) for comprehensive system control and monitoring.
- Communication: UART (via FTDI) and TCP/IP for data exchange and external control integration (MATLAB/Python).
How to Use It
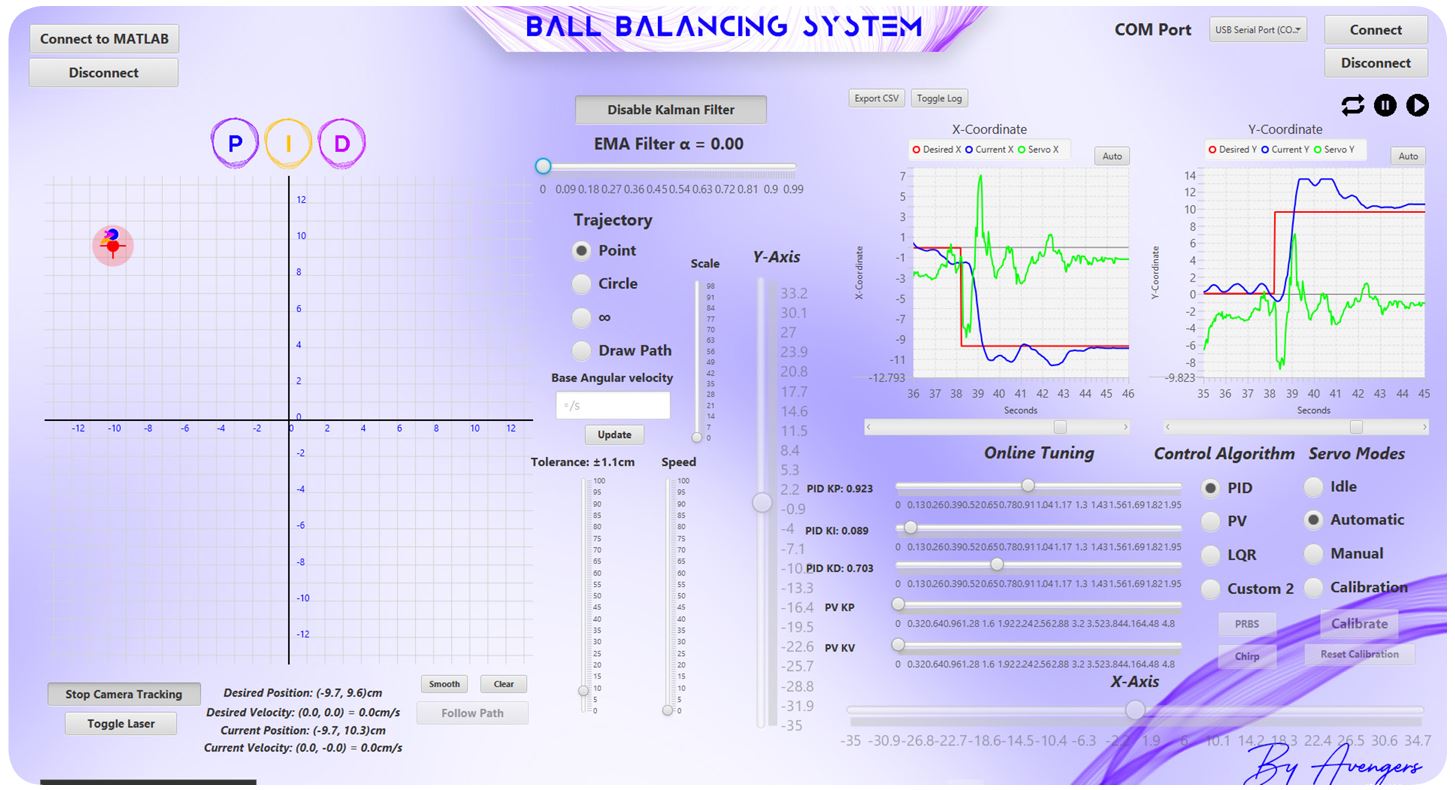
The system is controlled primarily through a Java-based Graphical User Interface (GUI).
- Hardware Setup: Ensure the ball balancing platform, servos, webcam, STM32 (Bluepill), FTDI converter, and power supply are correctly connected.
- Start Vision System: Run the Python program which uses OpenCV to capture video from the webcam and perform ball/laser tracking. An interface allows selecting the correct camera.
- Start GUI: Launch the Java GUI application.
- Connect Hardware: Use the GUI to establish communication with the STM32 via the FTDI serial module.
- Calibration (if needed): The GUI may offer a calibration mode. The Python vision system includes real-time trackbars for tuning HSV thresholds for ball and laser detection.
- Mode Selection: Choose between operating modes like idle, automatic, manual, or calibration via the GUI.
- Control Algorithm Selection: Dynamically select the desired control algorithm (PID, PD, LQR, or custom) through the GUI.
- Parameter Tuning: Adjust control parameters (Kp, Ki, Kd, EMA alpha, etc.) online via the GUI for fine-tuning the system response.
- Setpoints & Trajectories: Set desired ball positions or select/draw predefined trajectories (circle, figure-eight, custom paths) via the GUI. Input desired angular velocity for trajectory execution.
- Monitoring: View real-time tracking of the ball’s position on a coordinate grid and visualize system input-output behavior through plotted graphs on the GUI.
- Data Logging: Export recorded data as CSV files for offline analysis.
- External Control (Optional): The GUI can connect to MATLAB or Python scripts via TCP/IP, allowing control signals to be generated externally, facilitating experimentation with advanced control techniques.
Contributors
- Ali Emad
- Marawan ElSayed